层标准化
在本教程中,你将编写一个比 PyTorch 实现运行更快的高性能层标准化 (layer normalization) 内核。
在此过程中,你将了解:
- 在 Triton 中实现反向传播 (backward pass)。
- 在 Triton 中实现并行归约 (parallel reduction)。
动机
层标准化 (LayerNorm) 算子最先在 BA2016 中提出,旨在提高序列模型(例如 Transformers)或小 batchsize 神经网络的性能。它以向量 作为输入,并生成与输入 shape 相同的向量 作为输出。 标准化是通过减去均值并除以 的标准差来实现的。 标准化后,会应用带有权重 和偏置 的可学习线性变换。 前向传播可以表示为:
其中 是加到分母上的一个小常数,以保证数值稳定性。 首先让我们看看前向传播的实现。
import torch
import triton
import triton.language as tl
try:
# This is https://github.com/NVIDIA/apex, NOT the apex on PyPi, so it
# should not be added to extras_require in setup.py.
# 这是 https://github.com/NVIDIA/apex,不是 PyPi 的 apex,
# 所以不应该加进 setup.py 的额外依赖中
import apex
HAS_APEX = True
except ModuleNotFoundError:
HAS_APEX = False
@triton.jit
def _layer_norm_fwd_fused(
X, # pointer to the input 输入指针
Y, # pointer to the output 输出指针
W, # pointer to the weights 权重指针
B, # pointer to the biases 偏差指针
Mean, # pointer to the mean 均值指针
Rstd, # pointer to the 1/std 1/std 指针
stride, # how much to increase the pointer when moving by 1 row 指针移动一行应该增加多少
N, # number of columns in X X 的列数
eps, # epsilon to avoid division by zero 用于避免除以 0 的 epsilon
BLOCK_SIZE: tl.constexpr,
):
# Map the program id to the row of X and Y it should compute.
# 映射程序 id 到对应计算的 X 和 Y 的行
row = tl.program_id(0)
Y += row * stride
X += row * stride
# Compute mean
# 计算均值
mean = 0
_mean = tl.zeros([BLOCK_SIZE], dtype=tl.float32)
for off in range(0, N, BLOCK_SIZE):
cols = off + tl.arange(0, BLOCK_SIZE)
a = tl.load(X + cols, mask=cols < N, other=0.).to(tl.float32)
_mean += a
mean = tl.sum(_mean, axis=0) / N
# Compute variance
# 计算方差
_var = tl.zeros([BLOCK_SIZE], dtype=tl.float32)
for off in range(0, N, BLOCK_SIZE):
cols = off + tl.arange(0, BLOCK_SIZE)
x = tl.load(X + cols, mask=cols < N, other=0.).to(tl.float32)
x = tl.where(cols < N, x - mean, 0.)
_var += x * x
var = tl.sum(_var, axis=0) / N
rstd = 1 / tl.sqrt(var + eps)
# Write mean / rstd
# 写入 mean / rstd
tl.store(Mean + row, mean)
tl.store(Rstd + row, rstd)
# Normalize and apply linear transformation
# 归一化并应用线性变换
for off in range(0, N, BLOCK_SIZE):
cols = off + tl.arange(0, BLOCK_SIZE)
mask = cols < N
w = tl.load(W + cols, mask=mask)
b = tl.load(B + cols, mask=mask)
x = tl.load(X + cols, mask=mask, other=0.).to(tl.float32)
x_hat = (x - mean) * rstd
y = x_hat * w + b
# Write output
tl.store(Y + cols, y, mask=mask)
反向传播
层标准化算子的反向传播比前向传播要复杂一些。
设 为线性变换前的标准化输入 ,那么 的向量-雅可比乘积 (VJP) 为:
其中 表示元素逐次相乘, 表示点积, 是标准差。 和 是中间常数,用于提高以下实现的可读性。
对于权重 和偏差 ,它们的 VJP 和 更为简单:
由于在同一批次中的所有行使用相同的权重 和偏差 ,它们的梯度需要累加。为了高效地执行此步骤,我们使用并行归约策略:每个内核实例将某些行的部分 和 累积到 个独立缓冲区之一中。这些缓冲区保存在 L2 缓存中,然后通过另一个函数进一步归约以计算实际的 和 。
设输入行数 和 ,以下是 的并行归约策略图示(为简洁起见,省略 ):
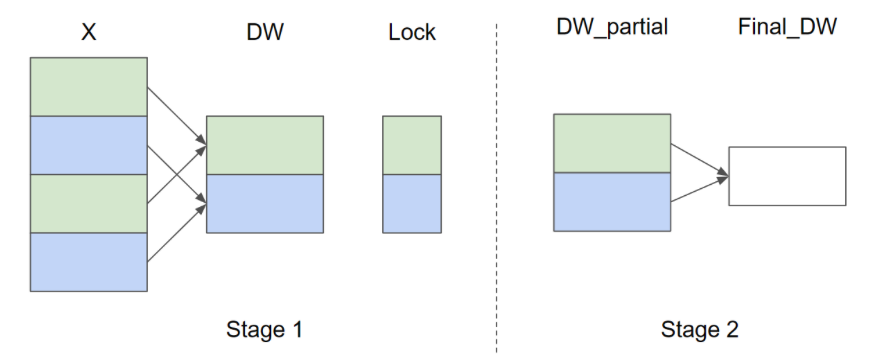
在第一阶段,同色的 X 行共享同一个缓冲区,因此使用 lock 以确保一次只有一个内核实例写入缓冲区。在第二阶段,这些缓冲区会进一步归约以计算最终的 和 。在以下实现中,第一阶段由函数 _layer_norm_bwd_dx_fused 实现,第二阶段由函数 _layer_norm_bwd_dwdb 实现。
@triton.jit
def _layer_norm_bwd_dx_fused(DX, # pointer to the input gradient 输入梯度指针
DY, # pointer to the output gradient 输出梯度指针
DW, # pointer to the partial sum of weights gradient 权重和梯度指针
DB, # pointer to the partial sum of biases gradient 偏差梯度部分和指针
X, # pointer to the input 输入指针
W, # pointer to the weights 权重指针
Mean, # pointer to the mean 均值指针
Rstd, # pointer to the 1/std 1/std 指针
Lock, # pointer to the lock 锁指针
stride, # how much to increase the pointer when moving by 1 row 指针移动一行应该增加多少
N, # number of columns in X X 的列数
GROUP_SIZE_M: tl.constexpr, BLOCK_SIZE_N: tl.constexpr):
# Map the program id to the elements of X, DX, and DY it should compute.
# 映射程序 id 到对应计算的 X, DX, DY
row = tl.program_id(0)
cols = tl.arange(0, BLOCK_SIZE_N)
mask = cols < N
X += row * stride
DY += row * stride
DX += row * stride
# Offset locks and weights/biases gradient pointer for parallel reduction
# 偏移锁和权重/偏差梯度指针以并行归约
lock_id = row % GROUP_SIZE_M
Lock += lock_id
Count = Lock + GROUP_SIZE_M
DW = DW + lock_id * N + cols
DB = DB + lock_id * N + cols
# Load data to SRAM
# 读取数据到 SRAM
x = tl.load(X + cols, mask=mask, other=0).to(tl.float32)
dy = tl.load(DY + cols, mask=mask, other=0).to(tl.float32)
w = tl.load(W + cols, mask=mask).to(tl.float32)
mean = tl.load(Mean + row)
rstd = tl.load(Rstd + row)
# Compute dx
# 计算 ds
xhat = (x - mean) * rstd
wdy = w * dy
xhat = tl.where(mask, xhat, 0.)
wdy = tl.where(mask, wdy, 0.)
c1 = tl.sum(xhat * wdy, axis=0) / N
c2 = tl.sum(wdy, axis=0) / N
dx = (wdy - (xhat * c1 + c2)) * rstd
# Write dx
# 写入 dx
tl.store(DX + cols, dx, mask=mask)
# Accumulate partial sums for dw/db
# 累加 dw 和 db 的部分和
partial_dw = (dy * xhat).to(w.dtype)
partial_db = (dy).to(w.dtype)
while tl.atomic_cas(Lock, 0, 1) == 1:
pass
count = tl.load(Count)
# First store doesn't accumulate
# 第一个储存不累加
if count == 0:
tl.atomic_xchg(Count, 1)
else:
partial_dw += tl.load(DW, mask=mask)
partial_db += tl.load(DB, mask=mask)
tl.store(DW, partial_dw, mask=mask)
tl.store(DB, partial_db, mask=mask)
# Release the lock
# 释放锁
tl.atomic_xchg(Lock, 0)
@triton.jit
def _layer_norm_bwd_dwdb(DW, # pointer to the partial sum of weights gradient 权重部分和指针
DB, # pointer to the partial sum of biases gradient 偏差梯度部分和指针
FINAL_DW, # pointer to the weights gradient 权重梯度指针
FINAL_DB, # pointer to the biases gradient 偏差梯度指针
M, # GROUP_SIZE_M
N, # number of columns 列数
BLOCK_SIZE_M: tl.constexpr, BLOCK_SIZE_N: tl.constexpr):
# Map the program id to the elements of DW and DB it should compute.
# 映射程序 id 到对应计算的 DW 和 DB
pid = tl.program_id(0)
cols = pid * BLOCK_SIZE_N + tl.arange(0, BLOCK_SIZE_N)
dw = tl.zeros((BLOCK_SIZE_M, BLOCK_SIZE_N), dtype=tl.float32)
db = tl.zeros((BLOCK_SIZE_M, BLOCK_SIZE_N), dtype=tl.float32)
# Iterate through the rows of DW and DB to sum the partial sums.
#迭代通过 DW 和 DB 的行,对部分和进行求和。
for i in range(0, M, BLOCK_SIZE_M):
rows = i + tl.arange(0, BLOCK_SIZE_M)
mask = (rows[:, None] < M) & (cols[None, :] < N)
offs = rows[:, None] * N + cols[None, :]
dw += tl.load(DW + offs, mask=mask, other=0.)
db += tl.load(DB + offs, mask=mask, other=0.)
# Write the final sum to the output.
# 将最终结果写入输出
sum_dw = tl.sum(dw, axis=0)
sum_db = tl.sum(db, axis=0)
tl.store(FINAL_DW + cols, sum_dw, mask=cols < N)
tl.store(FINAL_DB + cols, sum_db, mask=cols < N)
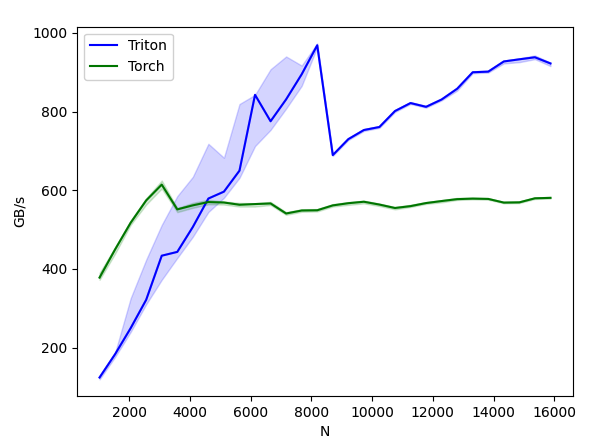
基准测试
现在我们可以比较 Triton 内核与 PyTorch 的性能了。这里以每个特征少于 64KB 的输入为例进行讲解。具体来说,可以设置 mode: 'backward' 来进行后向传播的基准测试。
class LayerNorm(torch.autograd.Function):
@staticmethod
def forward(ctx, x, normalized_shape, weight, bias, eps):
# allocate output
# 分配输出
y = torch.empty_like(x)
# reshape input data into 2D tensor
# 将输入数据的形状改为 2D 张量
x_arg = x.reshape(-1, x.shape[-1])
M, N = x_arg.shape
mean = torch.empty((M, ), dtype=torch.float32, device=x.device)
rstd = torch.empty((M, ), dtype=torch.float32, device=x.device)
# Less than 64KB per feature: enqueue fused kernel
# 少于 64KB 每个特征:入队融合内核
MAX_FUSED_SIZE = 65536 // x.element_size()
BLOCK_SIZE = min(MAX_FUSED_SIZE, triton.next_power_of_2(N))
if N > BLOCK_SIZE:
raise RuntimeError("This layer norm doesn't support feature dim >= 64KB.")
# heuristics for number of warps
# 对 warp 数量的启发算法
num_warps = min(max(BLOCK_SIZE // 256, 1), 8)
# enqueue kernel
# 入队内核
_layer_norm_fwd_fused[(M, )]( #
x_arg, y, weight, bias, mean, rstd, #
x_arg.stride(0), N, eps, #
BLOCK_SIZE=BLOCK_SIZE, num_warps=num_warps, num_ctas=1)
ctx.save_for_backward(x, weight, bias, mean, rstd)
ctx.BLOCK_SIZE = BLOCK_SIZE
ctx.num_warps = num_warps
ctx.eps = eps
return y
@staticmethod
def backward(ctx, dy):
x, w, b, m, v = ctx.saved_tensors
# heuristics for amount of parallel reduction stream for DW/DB
# 计算对 DW/DB 并行规约流数量的启发算法
N = w.shape[0]
GROUP_SIZE_M = 64
if N <= 8192: GROUP_SIZE_M = 96
if N <= 4096: GROUP_SIZE_M = 128
if N <= 1024: GROUP_SIZE_M = 256
# allocate output
# 分配输出
locks = torch.zeros(2 * GROUP_SIZE_M, dtype=torch.int32, device=w.device)
_dw = torch.zeros((GROUP_SIZE_M, N), dtype=x.dtype, device=w.device)
_db = torch.zeros((GROUP_SIZE_M, N), dtype=x.dtype, device=w.device)
dw = torch.empty((N, ), dtype=w.dtype, device=w.device)
db = torch.empty((N, ), dtype=w.dtype, device=w.device)
dx = torch.empty_like(dy)
# enqueue kernel using forward pass heuristics
# 使用前向传播启发算法入队内核
# also compute partial sums for DW and DB
# 同样用于计算 DW 和 DB 的部分和
x_arg = x.reshape(-1, x.shape[-1])
M, N = x_arg.shape
_layer_norm_bwd_dx_fused[(M, )]( #
dx, dy, _dw, _db, x, w, m, v, locks, #
x_arg.stride(0), N, #
BLOCK_SIZE_N=ctx.BLOCK_SIZE, #
GROUP_SIZE_M=GROUP_SIZE_M, #
num_warps=ctx.num_warps)
grid = lambda meta: [triton.cdiv(N, meta['BLOCK_SIZE_N'])]
# accumulate partial sums in separate kernel
# 在单独的内核中累加部分和
_layer_norm_bwd_dwdb[grid](
_dw, _db, dw, db, min(GROUP_SIZE_M, M), N, #
BLOCK_SIZE_M=32, #
BLOCK_SIZE_N=128, num_ctas=1)
return dx, None, dw, db, None
layer_norm = LayerNorm.apply
def test_layer_norm(M, N, dtype, eps=1e-5, device='cuda'):
# create data
# 创建数据
x_shape = (M, N)
w_shape = (x_shape[-1], )
weight = torch.rand(w_shape, dtype=dtype, device=device, requires_grad=True)
bias = torch.rand(w_shape, dtype=dtype, device=device, requires_grad=True)
x = -2.3 + 0.5 * torch.randn(x_shape, dtype=dtype, device=device)
dy = .1 * torch.randn_like(x)
x.requires_grad_(True)
# forward pass
# 前向传播
y_tri = layer_norm(x, w_shape, weight, bias, eps)
y_ref = torch.nn.functional.layer_norm(x, w_shape, weight, bias, eps).to(dtype)
# backward pass (triton)
# 反向传播 (triton)
y_tri.backward(dy, retain_graph=True)
dx_tri, dw_tri, db_tri = [_.grad.clone() for _ in [x, weight, bias]]
x.grad, weight.grad, bias.grad = None, None, None
# backward pass (torch)
# 反向传播 (torch)
y_ref.backward(dy, retain_graph=True)
dx_ref, dw_ref, db_ref = [_.grad.clone() for _ in [x, weight, bias]]
# 比较
assert torch.allclose(y_tri, y_ref, atol=1e-2, rtol=0)
assert torch.allclose(dx_tri, dx_ref, atol=1e-2, rtol=0)
assert torch.allclose(db_tri, db_ref, atol=1e-2, rtol=0)
assert torch.allclose(dw_tri, dw_ref, atol=1e-2, rtol=0)
@triton.testing.perf_report(
triton.testing.Benchmark(
x_names=['N'],
x_vals=[512 * i for i in range(2, 32)],
line_arg='provider',
line_vals=['triton', 'torch'] + (['apex'] if HAS_APEX else []),
line_names=['Triton', 'Torch'] + (['Apex'] if HAS_APEX else []),
styles=[('blue', '-'), ('green', '-'), ('orange', '-')],
ylabel='GB/s',
plot_name='layer-norm-backward',
args={'M': 4096, 'dtype': torch.float16, 'mode': 'backward'},
))
def bench_layer_norm(M, N, dtype, provider, mode='backward', eps=1e-5, device='cuda'):
# create data
# 创建数据
x_shape = (M, N)
w_shape = (x_shape[-1], )
weight = torch.rand(w_shape, dtype=dtype, device=device, requires_grad=True)
bias = torch.rand(w_shape, dtype=dtype, device=device, requires_grad=True)
x = -2.3 + 0.5 * torch.randn(x_shape, dtype=dtype, device=device)
dy = .1 * torch.randn_like(x)
x.requires_grad_(True)
quantiles = [0.5, 0.2, 0.8]
def y_fwd():
if provider == "triton":
return layer_norm(x, w_shape, weight, bias, eps) # noqa: F811, E704
if provider == "torch":
return torch.nn.functional.layer_norm(x, w_shape, weight, bias, eps) # noqa: F811, E704
if provider == "apex":
apex_layer_norm = (apex.normalization.FusedLayerNorm(w_shape).to(x.device).to(x.dtype))
return apex_layer_norm(x) # noqa: F811, E704
# forward pass
# 前向传播
if mode == 'forward':
gbps = lambda ms: 2 * x.numel() * x.element_size() / ms * 1e-6
ms, min_ms, max_ms = triton.testing.do_bench(y_fwd, quantiles=quantiles, rep=500)
# backward pass
# 反向传播
if mode == 'backward':
y = y_fwd()
gbps = lambda ms: 3 * x.numel() * x.element_size() / ms * 1e-6 # noqa: F811, E704
ms, min_ms, max_ms = triton.testing.do_bench(lambda: y.backward(dy, retain_graph=True), quantiles=quantiles,
grad_to_none=[x], rep=500)
return gbps(ms), gbps(max_ms), gbps(min_ms)
test_layer_norm(1151, 8192, torch.float16)
bench_layer_norm.run(save_path='.', print_data=True)
Out:
layer-norm-backward:
| N | Triton | Torch |
|---|---|---|
| 1024.0 | 124.121216 | 378.092307 |
| 1536.0 | 183.402983 | 449.560983 |
| 2048.0 | 249.502537 | 517.389457 |
| 2560.0 | 321.675394 | 574.205608 |
| 3072.0 | 433.694119 | 614.400016 |
| 3584.0 | 443.381459 | 551.384634 |
| 4096.0 | 506.721668 | 561.737163 |
| 4608.0 | 579.015709 | 570.061876 |
| 5120.0 | 596.504863 | 568.888888 |
| 5632.0 | 649.846161 | 563.200014 |
| 6144.0 | 842.605744 | 564.965499 |
| 6656.0 | 775.456322 | 566.468098 |
| 7168.0 | 831.072445 | 540.981122 |
| 7680.0 | 894.757295 | 548.571433 |
| 8192.0 | 968.512300 | 549.184373 |
| 8704.0 | 689.425724 | 561.548373 |
| 9216.0 | 729.980179 | 567.138460 |
| 9728.0 | 753.135476 | 570.836186 |
| 10240.0 | 760.866907 | 563.669722 |
| 10752.0 | 801.391287 | 554.941947 |
| 11264.0 | 821.689964 | 559.701851 |
| 11776.0 | 812.137928 | 567.518063 |
| 12288.0 | 830.738036 | 572.644636 |
| 12800.0 | 858.100582 | 577.443635 |
| 13312.0 | 899.966206 | 578.782596 |
| 13824.0 | 901.565197 | 578.006963 |
| 14336.0 | 927.396222 | 568.700819 |
| 14848.0 | 932.858643 | 569.252402 |
| 15360.0 | 938.015280 | 579.622631 |
| 15872.0 | 922.343822 | 580.682936 |
参考文献
[BA2016] Jimmy Lei Ba and Jamie Ryan Kiros and Geoffrey E. Hinton, “Layer Normalization”, Arxiv 2016
Download Jupyter notebook: 05-layer-norm.ipynb